







發表時間: 2022-12-13 14:04:06
作者: 石油化工設備維護與檢修網
瀏覽: 1451
振動保護是汽輪機組重要的保護項目之一,隨著汽輪機組不斷向高參數、大容量的趨勢發展,振動保護對汽輪機乃至其他大型旋轉機械的重要性顯得更加突出。根據《防止電力生產重大事故的二十五項重點要求》中規定:汽輪機振動保護必須投入。目前我國汽輪機組在出廠時的常規設計方案一般是單點保護,從生產現場的實際情況來看,這種方式存在單點保護誤動的問題,因此一些電廠寧愿違反相關規定,在機組并網正常運行后即退出振動大保護,給汽輪機組的安全運行帶來了極大的隱患。
1.常規振動保護邏輯優化方案
由于沒有國標或行業標準作為依據,之前國內汽輪機組出廠時的常規設置為在軸瓦的X/Y向各安裝一個渦流探頭,如圖1所示,振動保護一般為單點保護,即當各軸瓦的X/Y向任一探頭檢測到振動值達到跳機值時,振動保護動作,機組跳閘。由于渦流探頭測量從前置放大器到TSI系統采用負電壓傳輸,在受到電磁干擾或傳感器及卡件故障等情況下,機組容易出現誤發信號的情況,此外,這種重要保護設置成單點保護也違反了熱工重要保護應為“二取二”或“三取二”的可靠性配置設計原則。
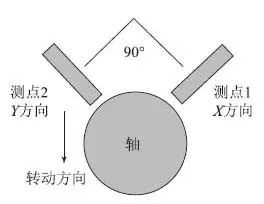
軸振測量示意圖
GB/T 11348.2—2012《機械振動在旋轉軸上測量評價機器的振動第2部分:功率大于50MW,額定工作轉速1500r/min、1800r/min、3000r/min、3600r/min陸地安裝的汽輪機和發電機》中新增如下內容為振動保護的設置提供了依據:“汽輪機和發電機通常是受自動控制系統控制的,如果超過停機振動值,自動控制系統使機器停機。為了避免虛假信號引起的不必要的停機,實際上通常采用多個傳感器控制邏輯,并在觸發機器自動停機的任何自控動作之前,規定一個時間延遲。因此,如果接收到振動停機信號,而且至少被兩個獨立的傳感器確認超過了規定的有限的延遲時間才可以觸發停機。典型的延遲時間是1~3s。為了慎重可以在報警值和停機值之間插入第二次報警,以預警操作人員正在接近停機值,他們可以采取任何校正措施(例如降低負荷或制造商建議的其他措施),避免滿負荷停機。”
近幾年來,隨著汽輪機故障問題的增多以及火電廠對設備安全重視程度的提高,大多數電廠對振動保護的邏輯進行了針對性優化,普遍采取“二取二”的組合邏輯方案。常規的組合邏輯優化方案主要有:
(1)任意瓦的X/Y方向振動中一個達到報警值,另一個達到跳閘值即觸發振動保護跳閘。
(2)任意瓦振動中任意一個達到跳閘值,且相鄰瓦X/Y方向振動任意一個達到報警值即觸發振動保護跳閘。
(3)任意瓦的X/Y方向振動中一個達到跳閘值,且除本瓦外任意瓦X/Y方向振動中一個達到報警值即觸發振動保護跳閘。
目前來說,國內機組在進行邏輯優化時大多選擇了第一種方案,雖然本瓦X/Y方向振動的相關性已得到認同,但具體幅值在各機組、各瓦中都不相同,因而也存在出現“拒動”的可能性。某電廠汽輪機組3瓦Y向軸振瞬時從100μm突升到300μm以上,而3瓦X向軸振只在90~120μm擺動,并未超過報警值,停機檢查后發現振動是由于3瓦浮動油擋掉落且已磕碰變形造成的。
對于第二種方案,相鄰軸瓦有兩種情況:一種是通過聯軸器相連的兩瓦相鄰;另一種是中間隔著缸體的兩瓦相鄰,其相關性并不被廣泛認同。汽輪機振動的主要原因有轉子質量不平衡、軸承損壞、油管崩裂造成摩擦、電磁不平衡、熱不平衡等多種,在本瓦軸承損壞時,有可能只是本瓦出現振動增大的情況或向聯軸器相連的軸瓦傳遞的可能性更大,而對于隔著缸體的相鄰兩瓦其傳遞的能量要少一些。即使是在振動故障中出現最多的轉子質量不平衡的情況下,雖然相鄰兩瓦振動具有相關性,但是具體定值的給出還需要根據實際情況進行計算,難以給出一個通用值以保證機組安全。
第三種方案是對前兩種方案進行綜合考慮的一種相對合理的方案,既考慮了由于相鄰瓦振動相關性不強可能產生保護拒動的情況,也考慮了同一瓦X/Y向信號布置在同一卡件時卡件故障可能造成保護誤動的情況,在最大程度上防止了保護誤動和拒動的發生。但這個方案邏輯組態較復雜,在進行振動保護傳動時需耗費很長的時間。
除了對保護邏輯進行優化以外,還可以采取一些措施,作為對振動保護的完善和補充,例如為了預防機組檢修后可能出現的不確定因素,在機組并網前可采用振動“一取一”保護邏輯形式,而并網后采用組合邏輯。采用軸振信號參與保護邏輯的報警定值可適當減小(建議由原設計的125μm改為100μm甚至更小,綜合平時正常運行值和機組啟動過臨界時的振動值考慮),或機組正常運行工況下各瓦的軸振值增加不大于50μm且不高于汽輪機廠家給出的報警值。
2.振動保護設置延時需注意問題
除對振動保護的邏輯進行優化外,GB/T11348.2—2012中還提到了振動保護延遲時間的設置,并給出典型的延遲時間為1~3s的建議。因此,部分電廠在進行了振動保護邏輯優化后還設置了延遲時間,由于部分機組發生的重大軸系故障振動值變化過程非常短暫,可能未達到保護延遲時間,未達到振動保護動作條件,但實際汽輪機內部已經發生很嚴重的事故。某電廠機組1~5瓦X/Y向振動同時出現突增,其中3、4瓦X向均超過300μm,之后迅速恢復正常,整個過程超過振動跳閘值的持續時間約2s,未達到保護延遲時間3s的動作條件,后停機解體發現中壓缸電端第二級隔板脫落、中壓轉子電端第二級動葉因磨損全部脫落、電端第一級動葉磨損。
3.結 語
汽輪機組內部發生故障時機組的振動情況是多種多樣的,從保護設備的角度出發,可能設置為單點保護是合適的;但從現場實際的運行情況來看,單點保護造成的保護誤動較多,從熱工可靠性保護設置原則角度對振動保護邏輯進行優化完善是很有必要的。但對于目前已進行振動大“二取二”冗余判斷的機組,已可達到防止信號突變造成保護誤動的要求,設置過長的延時反而會在振動確實大的時候增加設備損壞的風險,建議取消延時,即使暫不取消,建議設置不超過1s。除此之外,我們還需綜合平時正常運行值和機組啟動過臨界時的振動值考慮減小振動報警定值等各種細節,并設置任一軸承振動達到報警或動作值時明顯的聲光信號,以便振動值瞬間變化過快或有單點振動達到限值時,提醒運行人員加強監視,必要時手動停機,保證機組的安全運行。


